Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Automatizace
Zadání v pdf
Cvičení 5 Najděte první dvě derivace funkce y(x), která je
Technické detaily
Pozvánka - Výškovice - Novojičínská liga v požárním útoku
dve nádoby bez interakcie s overením PID algoritmov
DVERE ECONOMY
Zachraň jídlo chystá nový projekt. Bude sbírat přebytky v zemědělství
15. 5. Přidejte se k Zažít město jinak. Čas je do 31. května
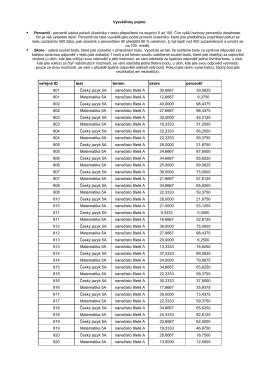
veřejné ID test termín skóre percentil 801 Český jazyk 5A nanečisto
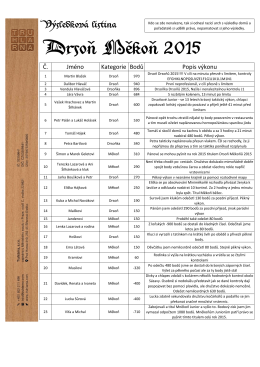
Drsoň a Měkoň výsledková listina
Sbírka řešených a neřešených příkladů z vybraný..
Zvláštní pojistné podmínky pro doplňkové pojištění
BW400V 5X
Přečtěte si pozorně následu
vy_32_inovace_16_20 - DUM gymjev
Stručný návod k montáži
File
VRT 320 VRT 330
Dynamo v náboji kola
10. Měření emisivity a teploty povrchů bezkontaktním teploměrem
Neplachtí jen lodě - volkswagen
Okresní kolo Pythagoriády pátých tříd – řešení