Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
pro studenty předmětu a2m17PMP
Problematika modelování elastohydrodynamického
Matematika a fyzika na Slovensku, JČMF a JSMF
První bioanalogická IOL
1. kapitola
null
1. kapitola
6. cvičení JADERNÁ FYZIKA • Jádro atomu • Radioaktivní rozpad
Hydraulika podzemní vody II (1) 19.2.14. Přetékání, rovnice
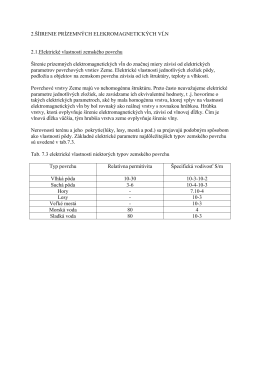
2.ŠÍIRENIE PRÍZEMNÝCH
Optimization of fibre
kap5.pdf
VÝPOČTOVÁ ZPRÁVA: KONÍK
Softwarové analýzy korozních rizik
Strategie zvládání zátěže v kontextu citové vazby v adolescenci
Diskretizace dat
Poznámky k některým tématům z přednášky TMF057
Rahim Ağzı Kanseri Afiş pdf için Tıklayınız
2012/2013 - VOŠ a SOŠ Bystřice nad Pernštejnem
Specifikacija za ЈН
2015 STATISTIKA
Parti Yemekleri
Ultrazvuk - základy ultrazvukové defektoskopie