Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Segmentace obrazu. Prahování. Houghova transformace. Detekce
Vážení zákazníci,
Metody Počítačového Vidění 1. cvičení
Leták 8. A5 - Pektiny v ovoci + Ovopres
Adobe PDF Print Engine
MLA-M katalogový list
prezentacni_systemy_katalog
Segmentace obrazu. Prahování. Houghova transformace. Detekce
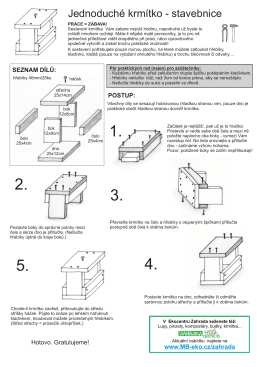
Krmítko - stavebnice
analýza jasových profilů při excentrické fotorefrakci
Konstrukce elipsy - matematika–fyzika–informatika
Chapter 12 Information Security
Stránka nenalezena - Incheba
N hodn veli ina s diskr tn m rozd len m pravd podobnosti
S040 Obsah.p65
PPI(wykł.no.4ABB-PPI
PROUDĚNÍ
Hodiny do automobilu
Počítačová grafika v předtiskových operacích Ing. Miroslav Fribert, Dr.
(05 - Segmentace a detekce geometrických primitiv)
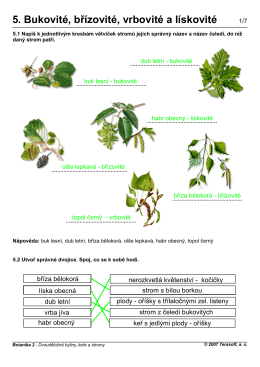
5. Bukovité, břízovité, vrbovité a lískovité
Zadání domácích úloh
listy 9 2012~1.pdf