Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
modely pro řešení rozhodovacích úloh v logistice i
mezinárodní vědecký seminář nové trendy v ekonometrii a
Od 10
zdvihací zařízení v teorii a praxi - Institut dopravy
farmarske listy 01_2016_fin
Text zprávy (PDF 171 KB)
informator_wrzesień_2015
Vzorový business plán
ke stažení zde ve formátu
Intervaly – operace s intervaly
Lineární algebra - Marie Hojdarová.pdf
Základy práce v MATLABu, tvorba skriptů
1. okruh Kritéria pro hodnocení složitosti paralelních výpočtů
Organizačné pokyny (pdf)
Plánování projektu
Co jsou vlastně zač?
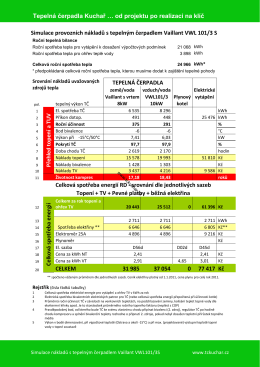
uložen v souboru pdf - Tepelná čerpadla Kuchař
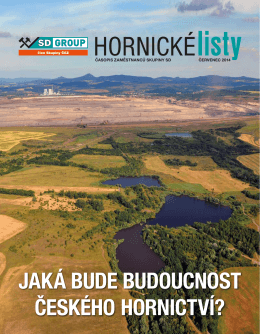
3/2014 - Hornické listy
návod C
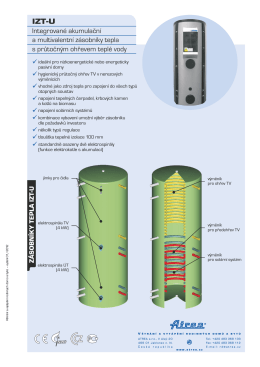
Integrované akumulační a multivalentní zásobníky - Prima
ZČU - Iaeste.
LINEÁRNE PROGRAMOVANIE
Průvodce doktorandů KIT povinnostmi spojenými se studiem