Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
matalyza2
Fyzikální chemie
KMA/MMAN1 Matematická analýza I
zajištění dodávky měřicího systému
Teorie a technologie obrábění (TaTO)
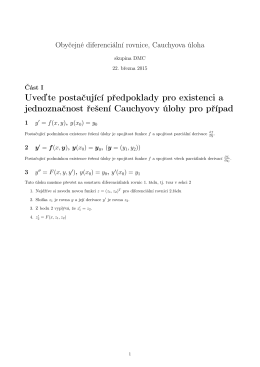
Uveďte postačující předpoklady pro existenci a
Určitý integrál Mocninné řady Def. Rozdělení intervalu Def
Okruhy témat k Státní závěrečné bakalářské zkoušce
Diferenciální pocet, pokracování
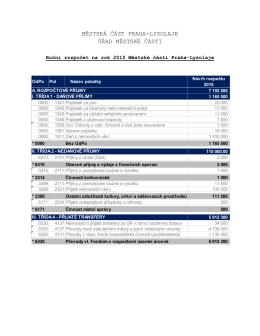
Rozpočet MČ Praha - Lysolaje na rok 2015
Přibližné vyjádření funkce
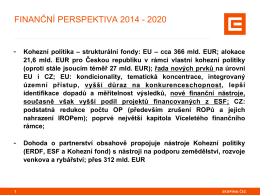
Dohoda o partnerství jako základní strategický rámec pro využití
EcoCCube - Durr Ecoclean
První zápočtový test Varianta A
lingebra1
Algoritmizace = „Schopnost řešit problémy?“
8. DÚ
Rekurze (P. Töpfer)
Strana 90-107 BSK, respirace
Určitý (Riemannův) integrál
Technická specifikace
Kaba elolegic Rodina produktů V3
Otázky k ústní zkoušce