Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
lingebra1
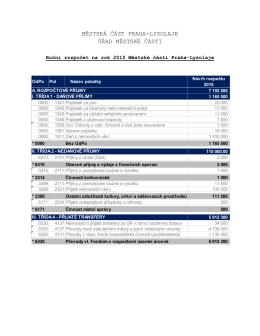
Rozpočet MČ Praha - Lysolaje na rok 2015
Chemie - 010 - Organická chemie
Lineární algebra - Marie Hojdarová.pdf
Moderní učebnice šachové hry – Richard Réti
Poznámky k některým tématům z přednášky TMF057
Patobiomechanika srdečněcévního systému
Rozum a vládnoucí planeta Vliv vládnoucí planety
ŠVP ZUŠ E Marhuly 4 - ZUŠ Eduarda Marhuly Ostrava
Algoritmy a datové struktury I finální verze 2011 (opravy možné
1. Vektorski prostori
matalyza2
Letecké laserové skenování
Hodnotový kontext volby mezi kariérou a domácností: mezinárodní
Pedagogical activity, participation of the team members in the
1. Grupa n – zoznámte sa, prosím
Ortogonální polynomy a MNČ materiál k samostudiu, poznámky a
Homomorfismus vektorových prostor˚u
+ F
2014_04_08-09_Cestovn zprva Brusel OOP
5. série
9150053 SS-201 STREAMER DVB-S-2 IP DiSEqC (MANUÁL)
Domácí úkol č. 2 k přednášce NMAG 102: Lineární algebra a