Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
metoda násobného dominantního pólu pro regulátory se dvěma
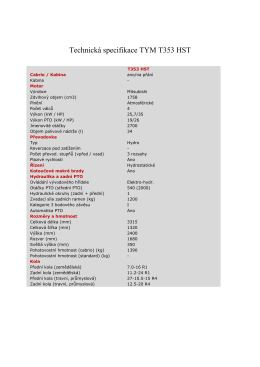
Technická specifikace T353 HST
Sčítání a odečítání zlomků - Dětský diagnostický ústav a SVP Liberec
Sborník XXXVIII. Seminář ASŘ 2014 - Fakulta strojní - VŠB
64 mln zł - Związek Miast i Gmin Dorzecza Parsęty
PL1: Pravidla počítání se zlomky
Teoretické otÃÂ
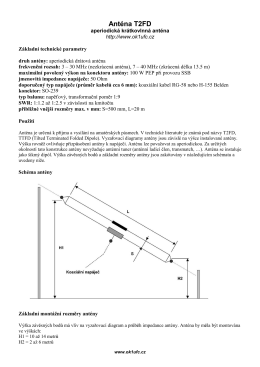
Anténa T2FD
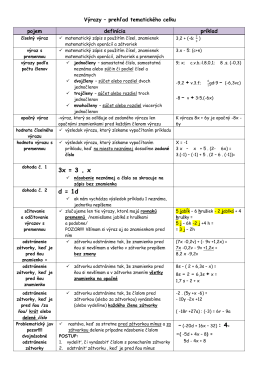
2.Maturitní úlohy – Algebraické výrazy
4 - Vlastnosti systému: Stabilita, převrácená odezva, řiditelnost a
1.modul-Genetická metoda čtení
Prof. Dr. Volkan ATALAY
Den dodavatelů skupiny RWE
the document in pdf format
ABSOLVENTI ZA POSLEDNí DESETILETí
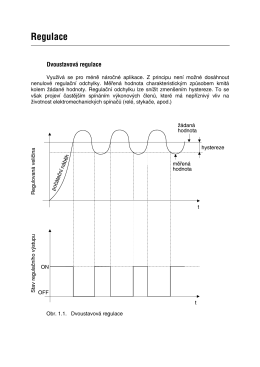
Jednoduchý popis dvoustavové a PID regulace.
Horalová Kalinová Michaela, Horal Stanislav
prehľad učiva 4
NEURČITÝ INTEGRÁL 1) Základní vzorce (platí na
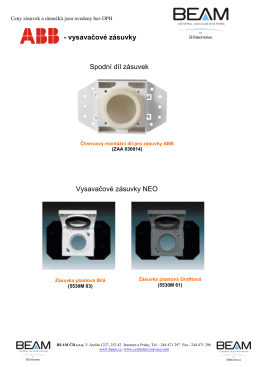
Vysavačové zásuvky ABB
Elementární funkce a základní elementární funkce
Záruční a reklamační podmínky
Variace na invarianci Kvaterniony a poc´ıtacová grafika Eva Blazková