Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Motorgenerátor
Informačný bulletin - e-testovanie
L – 410 UVP-E Turbolet (1 850mm) - KOR
Úvod do magnetismu, magnetické vlastnosti materiálů a magnetické
svahový soubojový speciál
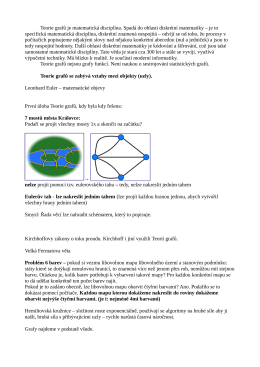
Teorie grafů je matematická disciplína. Spadá do oblasti
Rezonanční řízení s regulací proudu
zde - Kokoza
PDF souboru
54_55_Sport1 - sportfotky.cz
Elektrická rezonance: klíč k čerpání energie z prostoru
Električne mašine Zadaci za rad na časovima računskih
TEM TMX - Railvolution
biorezonance - Měření geopatogenních zón
Document
Konstrukce rezonančního motoru
Kogenerační jednotky KARLA ENERGIZE pro bioplynové stanice
sbornik
DATOVÉ CENTRUM ŠÁRKA
pracovní list
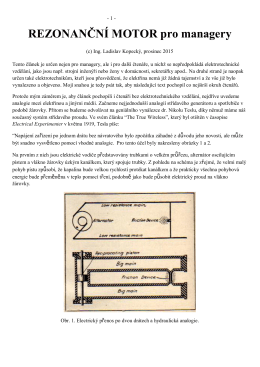
REZONANČNÍ MOTOR pro managery
Leták MREM 65 GR-EM
Využitie neurónovej siete pri riadení systému zabezpečenia