Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
İlker ŞAHİN - Trakya Üniversitesi
Walne Eurogites – 19.04.2013 Dalwitz Niemcy
Akademik Rapor Hazırlama ve Yazışma Teknikleri
Projekt „ROZWÓJ PRZEZ KOMPETENCJE” jest współfinansowany
mantığın matematiksel analizi ve elektrik-elektronik - E-JOIR
yönergesi - IEL Satranç
YURDUSAR Tarım Makinaları Turizm Sanayi ve Ticaret Anonim
betonarme 2 dersi ım 310 genel tanıtım
s - Düzce Üniversitesi
( ) () ( ) ( ) k X z x t x kT x kT z = = ( ) (0) ( ) (2 ) .... ( ) .... X z x x T z x T
Sunu 2 - LEYLA DEMIR
194 GEOMETRİK EŞİTSİZLİKLER 6.21 ,
Chikkura takımı tarihinde ilk kez
Ek Dosyayı İndir
türk telekomünikasyon a.ş. ttvpn özel indirim kampanyası katılım
null
Hakan karayılan - Trakya Üniversitesi
1+2x + x 2 ∈ Z5 [x]
industrijske mašine za pranje
Forever you DİFERANSİYEL DENKLEMLER Tanım 1 (Diferansiyel
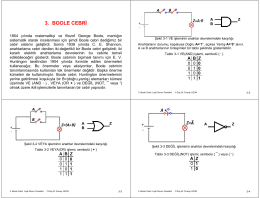
3. Boole Cebri
Çelikhane Cürufundan Ve Tufalından Bitki Besin Elementlerinin Geri







![1+2x + x 2 ∈ Z5 [x]](http://s1.readgur.com/store/data/000453795_1-c33842ff5288254dcc71e14dc91e675a-260x520.png)