Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
dynamický model termostatu s pevným teplonosným
袢ド 興 IW肝 ダ紺曇
Ceník potrubí 2015
Rytmus Života - Moravcova, Martina
Vírivá stropná výustka s pevnými lamelami Popis Objednávacie kódy
Tisková informace Nový přeplňovaný tříválec Kia 1 - kia
1 NOVA-B - IMOS
strana 95 ze 196 Minerální izolaţní stČrka k izolaci proti vodČ tlaţící
devireg® 610 - Valmark Warszawa
Kolektiv autorů. Automatizace a automatizační technika 2
Číslo zmluvy: 071214-1G - Stredná odborná škola, Cintorínska 4, Nitra
Přednáška 5
301 Czech Rep.p65
Devireg 850 osjetnik
Datový list
pełna treść komunikatu prasowego
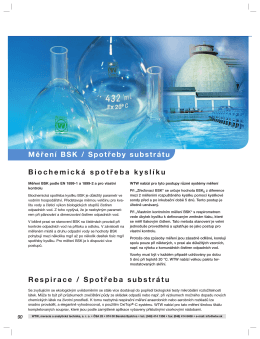
Strana 90-107 BSK, respirace
Vetracie mriežky a výustky série NOVA
10) Měření odporů můstkovými metodami
Přednáška 4
Uputstva za korisnike i instalatere DEVIreg™ 850
Untitled
Dynamické vlastnosti skleněných teploměrů