Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
2. úkol MI-PAA
Bosch myčky 60cm - Vyroba
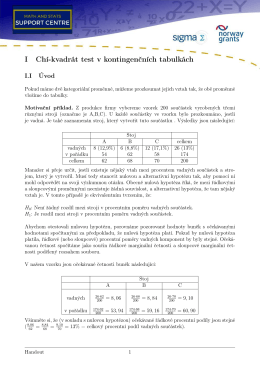
I Chí-kvadrát test v kontingenčních tabulkách
Archiv Projektu 8@8
Hospodářské ukazatele - Geoportál Ústeckého kraje
Serie | 6 SMI68N65EU »SuperSilence
9 Sériová komunikace - EEPROM pamet`, 74HC595+ LED
PRO ZAMĚSTNANCE, termín NEDĚLE 14. 6. 2015
maturitních okruhů
OCHRANNÁ MĚŘENÍ - Apos
Funkcionální programování - Typovaný lambda
– prohledávání grafů – DFS – Depth first search – BFS – Breadth
Program, jeho syntax a sémantika
Programování
Návod na dobový kostým – Tábor Jindřichovice 2015 Základem
BP a DP
Rekurze (P. Töpfer)
greenblue gb105 - Centrum Elektroniki
PEA – laboratorium nr 3
zápočtové úkoly - KMI/YPP1 Paradigmata programování 1
C→D - Ing. Martin Zwierzyna
17_quiz_wiedzy_o_krajach_anglojezycznych