Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
NÍZKOFREKVENČNÍ ELEKTRONIKA
DZ7_2015e
Názov vysokej školy, názov fakulty: Univerzita P. J. Šafárika v
t - Institut Fyziky - VŠB
Architekt odpadu 12 x za hranice všedních dn ! Motor bere (skoro
Kvartér 2003 - Ústav geologických věd
Recenze Kabelguru produktů
MEG jako dvojčinný blokující měnič
Výjimka ze zákazu užívaní k lovu ryb elektrického proudu
Řídicí obvody (budiče) MOSFET a IGBT
Strana: Pravá Znamení - Tragédky
Katalog: Magnety pro čistější životní prostředí.pdf
ADF Analogni filtri 2 Skripta
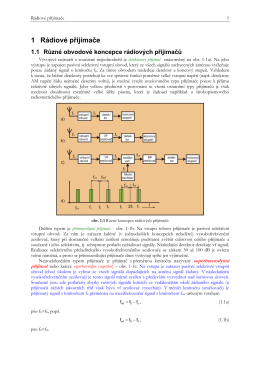
obsah knihy p. hémardinquera „moderní radiofonní přístroje“
Elektronika4-2
KATALOG SLUŽEB 2011-12 - APC - certifikační sdružení pro personál
ISSN 1805-6873 - Akademie STING
Podpůrný výukový materiál
Elektronika
TEORIE SYSTÉMŮ - Personalizace výuky prostřednictvím e
Základy spalování - Výzkumné energetické centrum
6 - Rutar
DUPLEX 2000 až 8000