Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Levný řadič pro 16 modelářských servopohonů
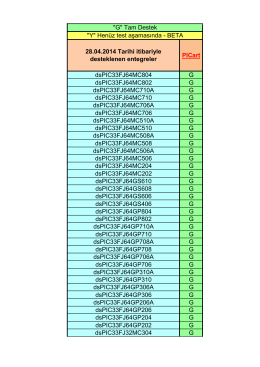
Listeyi görmek için lütfen tıklayın
PÁNTY PRE VITRÍNY POSÚVNE SETY PRE VITRÍNY
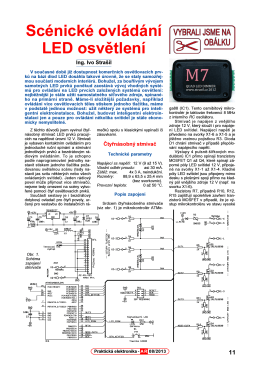
Scénické ovládání LED osvětlení
Residia-Jet-C Qn 1,5
Questions parlementaires
Labu - Gymnázium Sušice
Obsah: 1 Úvod........................................................................................3 2
OHLÉDNUTÍ DO BUDOUCNOSTI« ČEŠTINY
Stavebnice mechanické předvěsti ČSD rakouského typu ve velikosti
HEKTTOR.wz.cz WWW.
Specifikace Varifokální kamera vodotěsná
primjeri arhitektura mikrokontrolerske platforme
05.11.2013 info brigady 4513 - ICM
Metodika pro využití samostatných vzorových el. obvodů
Hodiny do automobilu
Uživatelská příručka 4038/4039/4068
ANT 11 ANT 5 - LDM Bratislava
Měření přijímací cesty transvertoru TR144H+40
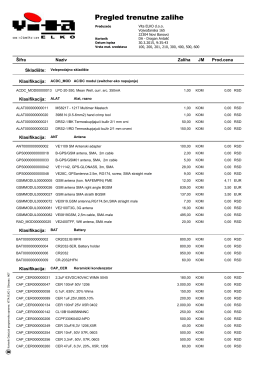
Pregled trenutne zalihe po skladištima i klasifikaciji
5. OCF dipóly (3).pdf
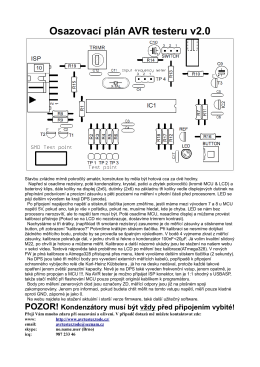
Osazovací plán AVR testeru v2.0
Bütçe Uygulama Sonuçları Tablosu