Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
T.C. SELÇUK ÜNĐVERSĐTESĐ FEN BĐLĐMLERĐ ENSTĐTÜSÜ
01 kunye.indd - Kaynak Yayınları
24-27 ŞUBAT 2014 - Uluslararası Turkuaz Sinema Günleri
Pozvánka na 22. mezinárodní konferenci Hydraulika a pneumatika
SM-6P DATA
Silindirik Düz Dişli Çarklar
Dişli çarklar_01 - Mehmet Adem Yıldız
Full Text PDF - Yüzüncü Yıl Üniversitesi
TORRICELLI: BAROMETREYİ İCAT EDEN MATEMATİKÇİ
B Kitapçığı
1 - www.omersencar.com
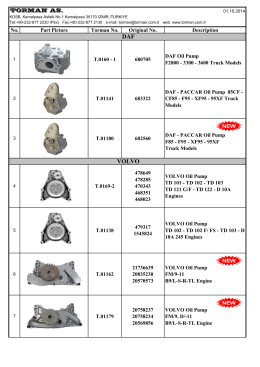
Torman Oil Pumps
İndirmek İçin Tıklayın
Slayt 1
22. Mezinárodní konference Hydraulika a pneumatika
ÖDEV - İTÜ Akademi
İndir
SERVISNÍ PŘÍRUČKA
AUTODESK ÖĞRENCİ FİKİR YARIŞMASI HALAT
adíció nnováció a menetvágásban!
PDF İndir - Türkiye Aile Hekimliği Dergisi
determınatıon of the dıstrıbutıon of global solar radıatıon for turkey
SYEK-Kuru Temizlik Çalışmaları