Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Statika tuhého tělesa Statika soustav těles
ZIMNÍ SVOZ TKO
Přebor ČOS v obřím slalomu 1. března 2015
čepové, valivé a pásové tření - Technická univerzita v Liberci
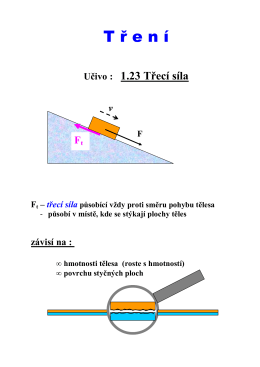
16.třecí síla
Mechanika – úvodní přednáška - Technická univerzita v Liberci
Věty a souvětí
DIZEL AGREGAT TEHNIČKI PODACI
dizel agregat tehnički podaci
conf-dop_hcc-cz.pdf
Dynamika hmotného bodu - Technická univerzita v Liberci
Ing. Václav Řidký - Fakulta mechatroniky, informatiky a
2 - MZK Chomutov sro
obsah
33 yaralı 33 yaralı 33 yaralı 33 yaralı 33 yaralı 33 yaralı
Kenar uzunlukları Geometrik Dizi Olan Tam Sayı Kenarlı üçgenler
Dynamika tuhého tělesa - Technická univerzita v Liberci
Dijital Fotogrametri
POWERSTRONG PSX
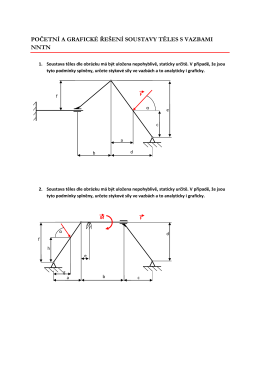
Početní a grafické řešení soustav těles s vazbami
NEWSLETTER | 1 | 2012
Bilten Fizika 2012
AUTOBARD - predaj náhradných dielov na motorové vozidlá