Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
20 - Číslicové a diskrétní řízení
Logické analyzátory a další přístroje pro diagnostiku číslicových
pdf - 2014.04.18. - Debreceni Egyetem
Plán cvičení
Zapytanie ofertowe - Nadzór techniczny w zakresie
Vzor ZPO 15 01 06.pdf
ke stažení
Z–transformácia / slovník Z–transformácie
20_Číslicové riadenie
Problematika ST 33 2000-5-559: 2013-03 Časť 5-559 - SEZ-KES
přiložený návod vám poradí (PDF ke stažení).
1. MultiSIM
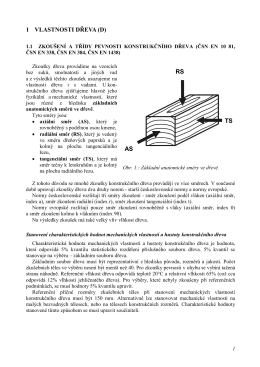
Cvicebnice SL - D.pdf - Vysoké učení technické v Brně
Stáhněte si PDF soubor zde
Plan d`études des maîtrises universitaires en traduction
Technický list
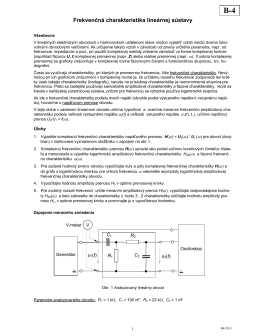
B-4
13 - Návrh frekvenčními metodami
odkaz
Programy dvou školení na téma PREDIKTIVNÍ ÚDRŽBA
číslicové meracie prístroje
Vážená paní, vážený pane, Dovolujeme si Vás opět
zde. - Ekotechnika