Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Matematicke algoritmy
PostgreSQL návrh a implementace náročných databázových aplikací
Recenze Kabelguru produktů
grudzień 2014 Nr 2 - Archidiecezja Warszawska
smlouva_O2.pdf (PDF, 1,35 MB)
1a. Modely životního cyklu SW. Návaznosti a produkty jednotlivých
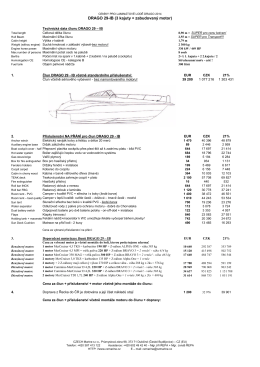
DRAGO 29-IB (3 kajuty + zabudovaný motor)
Internaupotreba
MATLAB Ek Ders 1
VKO - Větrání kotelen - PDF
Ekonomi Araştırmaları 01
Standardní nedestruktivní stavebně-historický průzkum (Petr Macek
Parallel experiments with RARE-BLAS - Lirmm
Pravidla pro tvorbu textů
Fyzika - Základní škola Cheb
RECENZE - Akademie věd ČR
Metodické pokyny - Věstník veřejných zakázek
Pojďme zažít pocit čisté ústní dutiny jako od zubního lékaře!
Diagnostická příručka - Siemens Industry Online Support Portals
Poznámky k některým tématům z přednášky TMF057
Bývalý pozemkový katastr, reambulance pozemkového katastru
Horké dny – super ceny!
Konference -program, profily