Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
zde - Robotiáda
Slovenská literárna moderna (1900 – 1918)
ACTA MATHEMATICA 13 - Katedra matematiky FPV UKF v Nitre
1 - Fakulta medzinárodných vzťahov
klobouky 1-2014.indd - Město Klobouky u Brna
Motorový křovinořez se 2-taktním motorem Sharks SH
Návod k použití
Untitled
Didaktické zásady vo vyučovaní matematiky
PDF, Výroční zpráva za rok 2013/2014 - Gymnázium Zlín
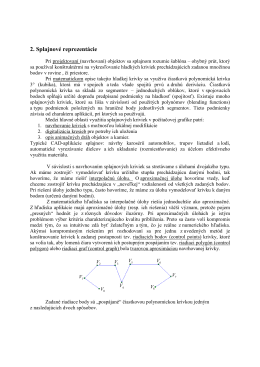
Polynomická interpolácia, podmienky spojitosti
souboru
Filozofia poznania - sylaby LS 2015.pdf
Stáhnout - Vychovakobcanstvi.eu
Sekty a sekulárne kulty
PRAVIDLÁ FLL ROBOT
Metody technické diagnostiky teorie a praxe
PŘEHLED SORTIMENTU
Plan cinnosti SKD
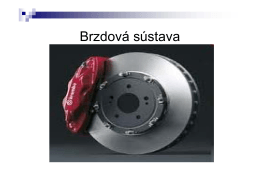
10.Stavba automobilov.pdf
LEGO® Education pro starší školní věk
Návod na montáž a obsluhu pohonov Easy G750/G1100
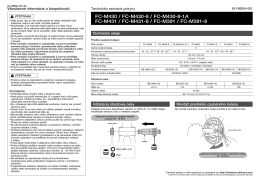
FC-M430 / FC-M430-8 / FC-M430-8-1A FC-M431 / FC