Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
ИЗВЕШТАЈ - Машински факултет
Document
Curriculum Vitae - Dragoslav Herceg i Đorđe Herceg
Структуре података и алгоритми
ovde
zbrku zadtaka
КОНСТРУКТОР 7 – МЕХАНИЗМИ И МАШИНЕ
Машински факултет — Књига предмета докторских студија
Master
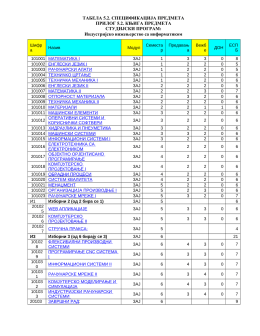
knjiga predmeta i specifikacija predmeta
izvestaj o samovrednovanju prilozi-1
Eвропски Универзитет
Ćwiczenie 4 - Politechnika Gdańska
Mart 2016, КОНКУРСНА ДОКУМЕНТАЦИЈА за јавну набавку
Фрушка гора без снежног огртача
CRRT u detí
Stowarzyszenie Wspólnie Dla Ośna Drugiego pragnie - Domi-Show
Consulter la présentation de la manifestation
Robot Operating System
смена 5
Механика робота
european polytechnical institute kunovice
MULTIMEDIA INTERFACE MOST AUDI MMI 2G 3G - BC