Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
acmspy2014_submission_63
AUTOMATIZAČNÍ SYSTÉMY I.
Növényházi adatgyűjtő- és vezérlőrendszer tervezése
Řada digitálních osciloskopů s pamětí AX-DS1000 Číslo
Procesy, meziprocesová komunikace a její synchronizace
FFT spektrální analyzátor v osciloskopech LeCroy
Stáhnout - SPŠel•it Dobruška
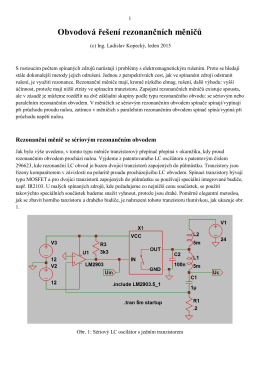
Obvodová řešení rezonančních měničů
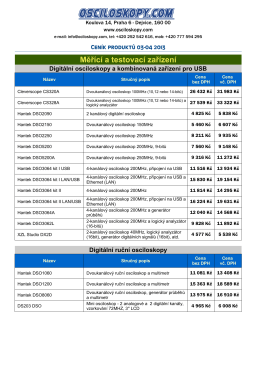
ZDE - Osciloskopy
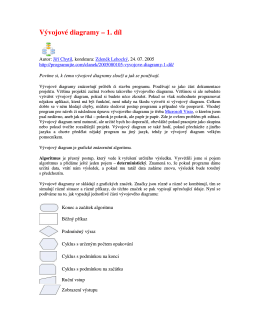
Vývojové diagramy – 1. díl
Adresy paměti počítačů ATARI 600XL/800XL
ikona - i4Comfort
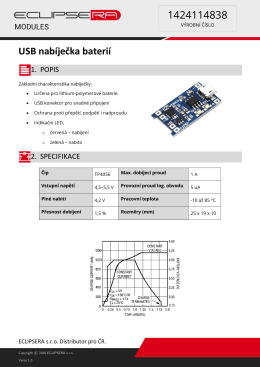
USB nabíječka baterií
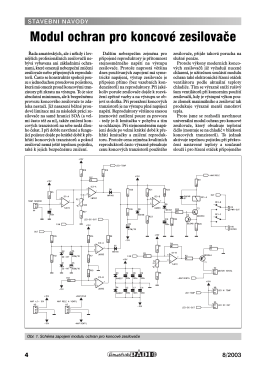
Modul ochran pro koncové zesilovače
konstrukcja innowacyjnego systemu alarmowego stanowiącego
Zadania cz. D - Olimpiada Fizyczna
R - Karadeniz Teknik Üniversitesi
všechny projevy rizikového chování
1. Hafta
Ing. Václav Kozák - PL/SQL programátor bloguje
Optimizacija logičke funkcije - Vanr.prof.dr. Lejla Banjanović
S Tektronixem na spektrum
DS1100 datasheet - TIBBO Technology