Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Bapko Proje Raporu - Doç.Dr.Mehmet Tektaş
View/Open
Yapay Sinir Aglari
kimkorkar12
Selçuklular ve Osmanlı Döneminde Medreselerin Mali Kaynakları
1 - ITO
Bor Madeni Ekonomisi - Kütahya Ticaret ve Sanayi Odası
Ek : Sözleşmeli Mübaşirlik sözlü sınavı sonucu nihai başarı listesi
Sosyal Psikoloji Giriş
Soru 1: CCS programında TABLE, LDR, LSL, ADR komutlarını
TARMAKBİR Sektör Raporu
ANKARA - 2014 - Obezite, Diyabet ve Metabolik Hastalıklar Daire
3. Mendel Genetiği.pptx - Prof. Dr. Bektaş TEPE
MKK Yatırımcı Bilgilendirme Hizmetleri Tanıtım Kitapçığı
f - Selçuk Üniversitesi Dijital Arşiv Sistemi
Buradan - BThaber
i ÖZET YÜKSEK LĐSANS TEZĐ EPĐLEPSĐ TEŞHĐSĐ ĐÇĐN EEG
Matematik Öğretiminde Uyarlanabilir Zeki Web Tabanlı Eğitim
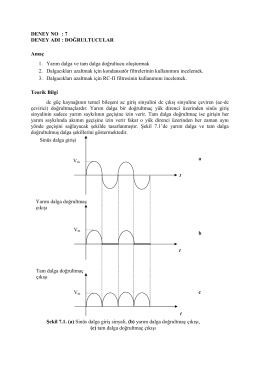
DENEY NO : 7 DENEY ADI : DOĞRULTUCULAR Amaç 1. Yarım
1.Hafta Mantık Konu - herodevyapilir.com