Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
(05 - Segmentace a detekce geometrických primitiv)
STRATEGICKÝ PLÁN ROZVOJE MĚSTA NOVÁ ROLE
FIFA 16 Xbox 360
Franz Boas: Lingvistika a etnologie (pdf)
FIFA UltIMAte teAM (FUt)
ZPRACOVÁNÍ DIGITALIZOVANÉHO OBRAZU
Lineární algebra - Marie Hojdarová.pdf
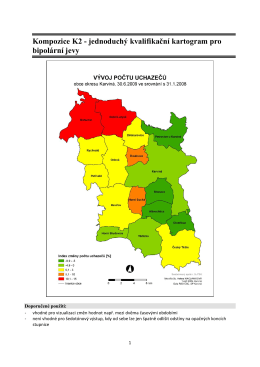
Kompozice K2 - jednoduchý kvalifikační kartogram pro bipolární jevy
o jedné záludnosti interakce «include» v modelu případů užití
10. Měření emisivity a teploty povrchů bezkontaktním teploměrem
FIFa ultImate team (Fut)
FIFA 16 Xbox One
Okruhy témat k závěrečným zkouškám rozšiřujícího studia
Opakovani C
A2M31SMU - SIGNÁLY V MULTIMÉDIÍCH SEZNAM OTÁZEK VE
FIFA 16 pro PC
Public relations v digitální éře: Jeho role poroste
06 - Regionální segmentace a shlukování
analýza jasových profilů při excentrické fotorefrakci
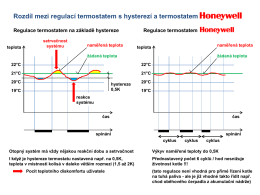
Rozdíl mezi regulací termostatem s hysterezí a
KURZ OSVĚTLOVACÍ TECHNIKY XXVIII
Společné prohlášení o společné praxi týkající se přijatelnosti
Topografické a funkčné znázornenie oblastí mozgového