Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Uputstvo za vežbu
Genesis árlista 2015
meslek yüksekokullarının e-öğrenme modeline geçişinde - E-JOIR
BIH - Prevoz Putnika.rs
Sprawdź warunki uczestnictwa
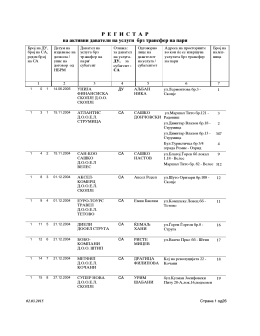
R E G I S T A R na aktivni davateli na uslugi brz transfer na pari
Kol ve önkolun ön bölgesi
LABORATORIJSKA VJEŽBA BROJ 2
Model izvestaja - Autoprevoz, Banja Luka
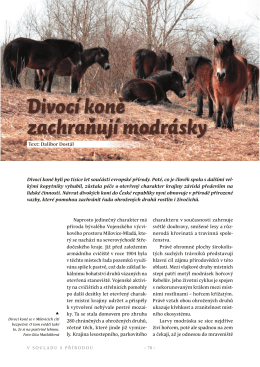
Celý článek v PDF - konference
Plik PDF
305381 Microcontroller Interface Lab 2 1 ภาควิชาวิศวกรรมไฟฟ้าและคอมพ
MAFIE BRNO 2014
Analytic Pattern (Analytické vzory)
WYBRANE ZAGADNIENIA IMPLEMENTACJI
Zábeh brzdových dosiek Ferodo Racing
Deney 1
prg_tem_uyg_kıtabı_tanıtım
Laboratorium 1: Szablon strony w HTML5
Data: 09.10.2015 Laboratorium nr 2 Przedmiotem dzisiejszych
önkol ve elin arka yüz kasları
Chapter15