Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
određivanje brzine na osnovu deformacionog rada
Applied virtual (VT) technology on bus superstructure roll
koeficijent restitucije
Potansiyel -pH diyagramı
Izveštaj nezaviskonog revizora za 2013. godinu
geotehnički aspekti građevinarstva
Nacrt tarifnog sistema - JKP "Gradska Toplana" Kruševac
b - menso88.com
SVOJSTVA STENA I TLA U TERENU
INTELIGENTNÍ VOZIDLOVÉ SYSTÉMY – SYSTÉMY PRO
Kula Gezisi - Mühendislik Fakültesi
null
Opšti uslovi poslovanja kreditnim karticama Tuzla
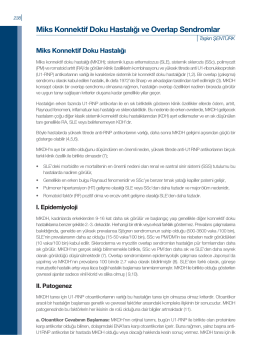
Miks Konnektif Doku Hastalığı ve Overlap Sendromlar
Programiranje 1
Skřítci zvědavci www.montessoridoma.cz