Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Sredanovic PREZENTACIJE SA VJEZBI IZ OBRADNIH SISTEMA ZA
podloge za vježbe iz obradnih sistema za obradu rezanjem
univerzitet u banjoj luci mašinski fakultet oprema u laboratoriji
klikni za pregled
KAPITALIZACIJA ZNANJA – PROFIT KROZ ISTRAŽIVANJA
POVRCHOVÉ ÚPRAVY MATERIÁLOV PROCES VYSVETLENIE
Preuzmite dokumet u pdf formatu
Untitled - Lokalni razvoj
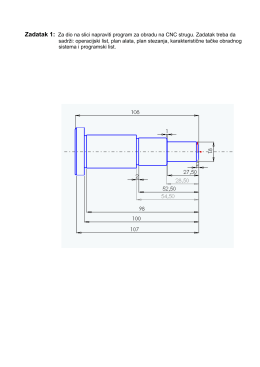
Zadatak 1: Za dio na slici napraviti program za obradu na CNC
Dipnotlar - Allianz Sigorta
product catalog
Programiranje na CNC maš. III
CNC KONTROLER 3SB
Osnove programiranja NC
МТКК практичан рад обласно такмичење
Üniversitelerde Verilen Hizmetlerin Öğrenci Memnuniyeti Açısından
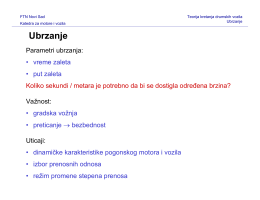
Ubrzanje - WordPress.com
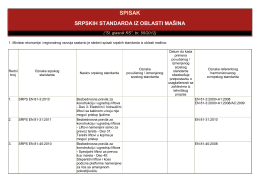
Spisak srpskih standarda