Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Dodatni grafici za knjigu MUEP AC.pdf
Symposium Program.pdf
Радови на домаћим конференцијама
Fyzika AI, LS 2014-15, cvičenie 2
Napęd elektryczny „E-KIT” dla miejskiego samochodu osobowego
Instrukcja PMSM
Document
Ürün Fiyat Listesini görmek için tıklayınız.
Letölthető innen.
PDT 1 - Diskretni signali i sistemi.pdf
Uzman Dr. Cezmi KAYAN
F1 – opakovaná Cvičenie 3 1. Kolotoč sa otáča uhlovou
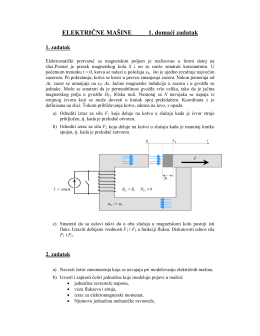
ELEKTRIČNE MAŠINE 1. domaći zadatak
SHIMGE - portal
DENEY 6 ÜÇ FAZLI SENKRON GENERATÖRDE BOŞTA ÇALIŞMA
ZAŠTITA GENERATORA
ASENKRON MAKİNALAR - Bülent Ecevit Üniversitesi
ASENKRON MAKİNALAR - Bülent Ecevit Üniversitesi
3. Bölüm: Asenkron Motorlar
มอเตอร์ไฟฟ้าส าหรับขับเคลื่อนรถไฟฟ้า