Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Aletli Gösterge Ve Aviyonik Sistemler
Rapor - Karadeniz Teknik Üniversitesi
Alet Sistemleri 1 - Sivil Havacılık Haberleri
İTALYA GÖLLER BÖLGESİ
iş güvenliği tutanağı
Dosyayı İndir - TOBB Ekonomi ve Teknoloji Üniversitesi Açık Erişim
ST.PETERSBURG - MOSKOVA
tesġsat teknolojġsġ ve ġklġmlendġrme elektrġk ark boru
Murat AKPINAR-Gemilerde Enerji Verimliliği Planının Kabotaj
Habersiz Kabin Yol Boyu Kontrol Formu
bilgisayarınıza indirin - makine mühendisliği
Bütçe Gelirlerinin Ekonomik Sınıflandırılması
Bolum_1
Genel Bilgi (Ege Üniversitesi) - İdealsan Endüstriyel Otomasyon
Toplantı Raporu - Sivil Havacılık Genel Müdürlüğü
Oddělovací a redukční transformátory APC
NO/SO2 - IMR Environmental Equipment, Inc
R - Karadeniz Teknik Üniversitesi
Mnometre kalibrasyon eğitimi
Genelge taslağı için tıklayınız. - Sivil Havacılık Genel Müdürlüğü
Uputstvo za upotrebu (pdf)
McCarran Intl Airport FBOs (Las Vegas, NV) [KLAS/LAS] FlightAware
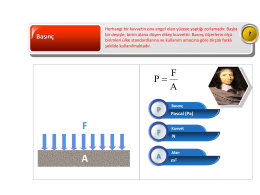
1. Bölüm - Temel Kavramlar 2. Bölüm - Uygulamalar




![McCarran Intl Airport FBOs (Las Vegas, NV) [KLAS/LAS] FlightAware](http://s2.readgur.com/store/data/002522551_1-c14d99a7c009208f59bb1f63015e2830-260x520.png)
