Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Vyhledávání a třídění
PROGRAMOVÁNÍ - Wichterlovo gymnázium, Ostrava
Odpady
Manuál pro napojení IS K2 na e
Třídění
Brožura - EKO servis Zábřeh
Prezentace k navrhovanému řešení integrace aplikačních
Složitost
PROGRAMOVANIE V LAZARUSE PRE MATURANTOV
Jednoduché příklady na procvičení základů ja
Seminarski rad iz predmeta Napredni softver
Celou zprávu naleznete zde.
Třídicí algoritmy a násobení matic
5.2 Analýza vět, které nespadají pod logický čtverec
nova verzia
Matematika
bližší informace
Platforma FileMaker – Které produkty si koupit
przykładowe zadania na kolokwium
Sortiranje.
Inventura
Primjena software-a Mathematica - Projekt
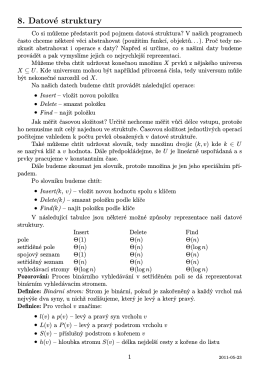
8. Datové struktury