Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
SISTEMI NELINEARNIH JEDNACINA
MATEMATIKA I MATLAB
Ispitna pitanja - PMF Personal Pages
1 SJF Drezúrna úloha pre pony P2 ( 2010 )
DREZURNÍ ÚLOHA PRO VŠESTRANNOST
Realna analiza IV gl..
Уџбеник
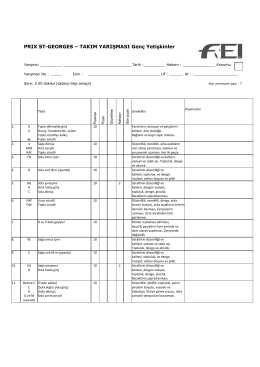
Genç Yetişkinler Takım Yarışması Testi
TEORIJSKA MEHANIKA Lagranzeva i Hamiltonova mehanika
Numericko proucavanje kvantnih gasova na niskim temperaturama*
PIC18 LCD Kullanımı
Predavanja iz Osnova matematike 2014
Türkçe - Eva Gayrimenkul Değerleme
Analiza LVN kola u prostoru stanja
한국천문연구원 박사후연구원 채용공고
MATEMATIˇCKA ANALIZA
Bernoulliho nerovnosť Nech a > 0, a = 1. Nech 0 Pretože
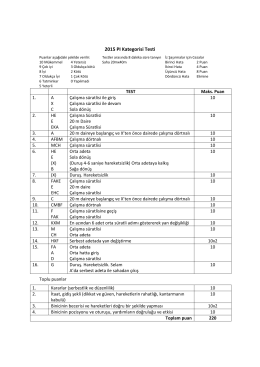
PI Kategorisi Yarışma Testi
2 LEGENDA: - Dolní Chabry