Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Racunarski podržano merenje i upravljanje, Seminarski
ТМ оглед Приручник за матурски 2014
FOODinfo 19
Règlement numéro 152-2016 sur la circulation des véhicules hors
Teploty, časy a tlakové sily pre sublimačné materiály
Deney Föyü
hi!tech - Siemens AG Österreich
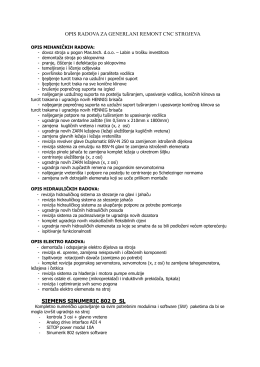
Generalni remont CNC - Mas.Tech.
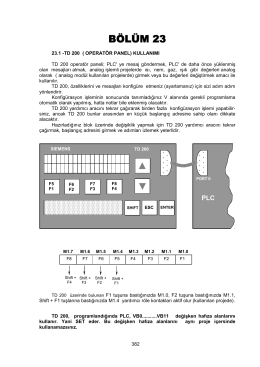
BÖLÜM 23
STS Sistem Organizasyon Şeması
Eyüp GÜRCAN - Elektrik-Elektronik Mühendisliği Bölümü
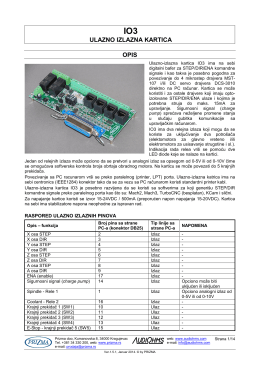
IO3 - Audiohms
Ponuka školení - Simatic
Napájecí zdroje SITOP
FIZIČKA ELEKTRONIKA - Elektronski fakultet Nis
Univerzalni merni instrument
MEKATRONİK GRUBU
169. broj PDF
CNC KONTROLER 3SB
Katalog a ceník mikrosystémů
mıcropuls 58
L7-Lietadlá vrtuľové v mierke 1:32 H - Helikoptéry (bez
MULTICAL® 602 - Zkušebna Mydlovary sro