Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Sistemi za rad u realnom vremenu (Real Time Systems
Programme of the Conference
Informatika_1.deo_skripta
C++ döküman
Sterownik bezprzewodowy HKEU XA/XAL
AND Instruction
Wykład 6
celý v jednom PDF - Mít vše hotovo.cz
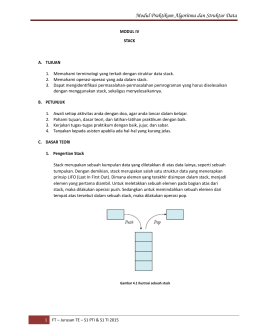
Modul 4 (STACK) 2015
Osnove objektno orijentisanog programiranja Microsoft