Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Sistem za supresiju tremora ruke u realnom vremenu
POPIS IZDATIH PRIZNANJA - www . uprava
List of posters
Hídépítők újság 2013/1 - A
научном већу института за хемију, технологију и
Водич ниског раста за откривање, дијагнозу и лечење ниског
Comparison of diagnostic peritoneal lavage and
ISPO VIJEST : K O JE PR OKLEO BRENU
Türk Coğrafya Kurumu ´nun düzenlediği, "İklim Değişimi ve İnsan"
Miologija
Ders 5 (01.04.2015) - Yrd.Doç.Dr.Fatih AY
Jovan Marjanović - Veljko Milković
PDF İndir - Türkiye Aile Hekimliği Dergisi
fpga tabanlı sayısal sinyal işleme algoritmalarına özelleştirilmiş
PDF İndir - Türkiye Aile Hekimliği Dergisi
28. MAKALE:Layout 1 - Beden Eğitimi ve Spor Yüksekokulu
UPŠTE UPUTSTVO ZA UPOTREBU
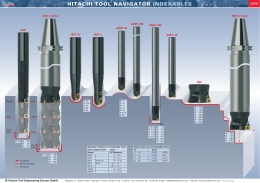
ASR ASR & Arbor BCF-S BCF-L ABPF-WE ABPF-W ARPF
Hrvoje 1 – goniometar za 3.5 MHz
Dr Tomislav Šekara
Zpravodaj Beseda Svatopluk Čech Zürich
Rollpa - podrobnější popis
Razvoj sistema za merenje raspodele sile reakcije podloge