Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
3D papíron és képernyőn - IPA HU-SRB/0901/221/088, 2010-2011
PRAVILNIK
Directors` reports
MĚSÍČNÍK DIS ÚK n.s.
opšte uputstvo za bezbedan rad i odrţavanje opreme, mašina i
Nesne Tabanlı Programlama Ders Hakkında Ders
MĚSÍČNÍK DIS ÚK n.s.
Březen 2015
vaza za cveće ili tegla
O topljenju leda - IPA HU-SRB/0901/221/088, 2010-2011
cudo-izlecenja
BEOtin 1. broj 2013
Populasyon Ekolojisi - Sakarya Üniversitesi
4442.Antoni de Mello
slajdy - Modelowanie Wieloagentowe
Diagram tříd
Izvod funkcije
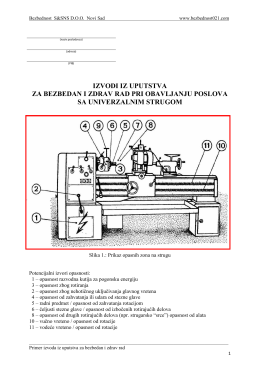
izvodi iz uputstva za bezbedan i zdrav rad pri obavljanju poslova sa
Sociologija 2014-03.indd
monte carlo yöntemiyle düşük enerjili pozitronların madde ile
Sencha Ext JS - Zielona Góra JUG
Novi plan i program za master studije - RAF-u
Agentové modelovanie kognitívnej rádiovej siete