Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Yapay Zeka Teknolojilerinin Endüstrideki Uygulamaları
Lisans Ders İçerikleri - Kocaeli Üniversitesi Bilgisayar Mühendisliği
R - Karadeniz Teknik Üniversitesi
Algılayıcılar ve Algılayıcı Seçimi
Açmak / İndirmek için Tıklayın
Süleyman TOSUN - Bilgisayar Mühendisliği
Витректомија парс плана са екстракцијом
Broşür - savunma sanayii araştırma ve geliştirme enstitüsü
TÜBİTAK 1511 Programı Kapsamında Yeni Çağrılar için Başvurular
Yapay Sinir Ağları Uygulama Alanları
Özgeçmiş - Dumlupınar Üniversitesi
2015.06.12_Diyarbakır Lice`li `Mehmet Hişyar Korkusuz`
ENDÜSTRİYEL ROBOTLAR
MAXOLEN_2013_POLISHMAX katalog-SK.indd
fizibilite etüdü ve iş planı
Ş - Makina Mühendisleri Odası
Genel Bilgi (Ege Üniversitesi) - İdealsan Endüstriyel Otomasyon
Slayt 1
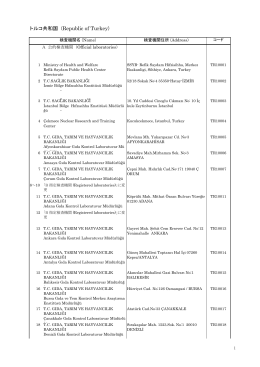
トルコ共和国 (Republic of Turkey)
Konu4-Threadler
Robotlar - Bilim Teknik
Optik cihazların bileşenleri
Wysoka jakość i rozsądna cena w jednej marce!